{kind=link}
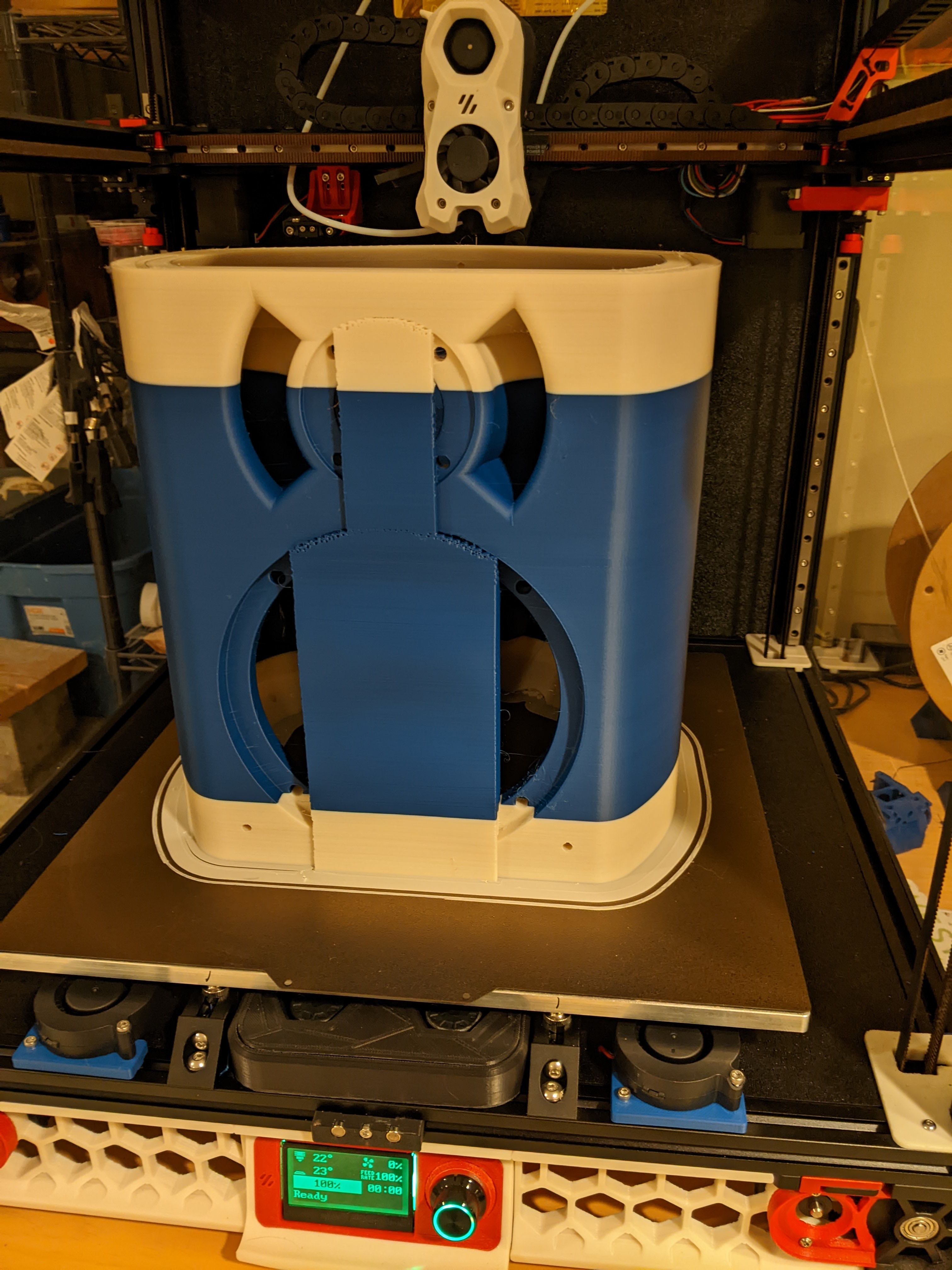
No banana for scale, but let’s say that it’s not too big and not too small. The dimensions are 295mm tall, 270mm wide, and 240mm deep. If I had to do it again, I would be tempted to go a bit wider and touch less deep. It’s probably better to be large in one of these dimensions as opposed to both of them.
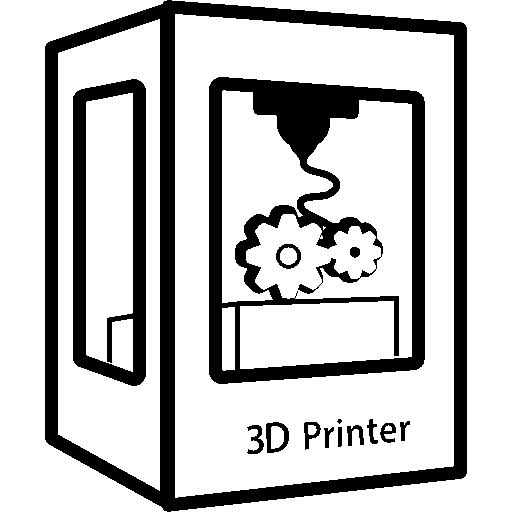
Here’s the top. It has a jack for charging, a connector to program the DSP, a switch to turn it on and off, and a battery gauge.

The speaker also has a built in handle that’s way chunkier than it appears, but is still particle.
The big BOM pieces are a Dayton Audio LBB-5Sv2 for the BMS (battery management system), a Dayton Audio KABD-250 2 x 50W for DPS, amplification, and Bluetooth, a Peerless by Tymphany BC25SC08 tweeter, and an Italian-but-made-in-India woofer (a Coral PRF 165).
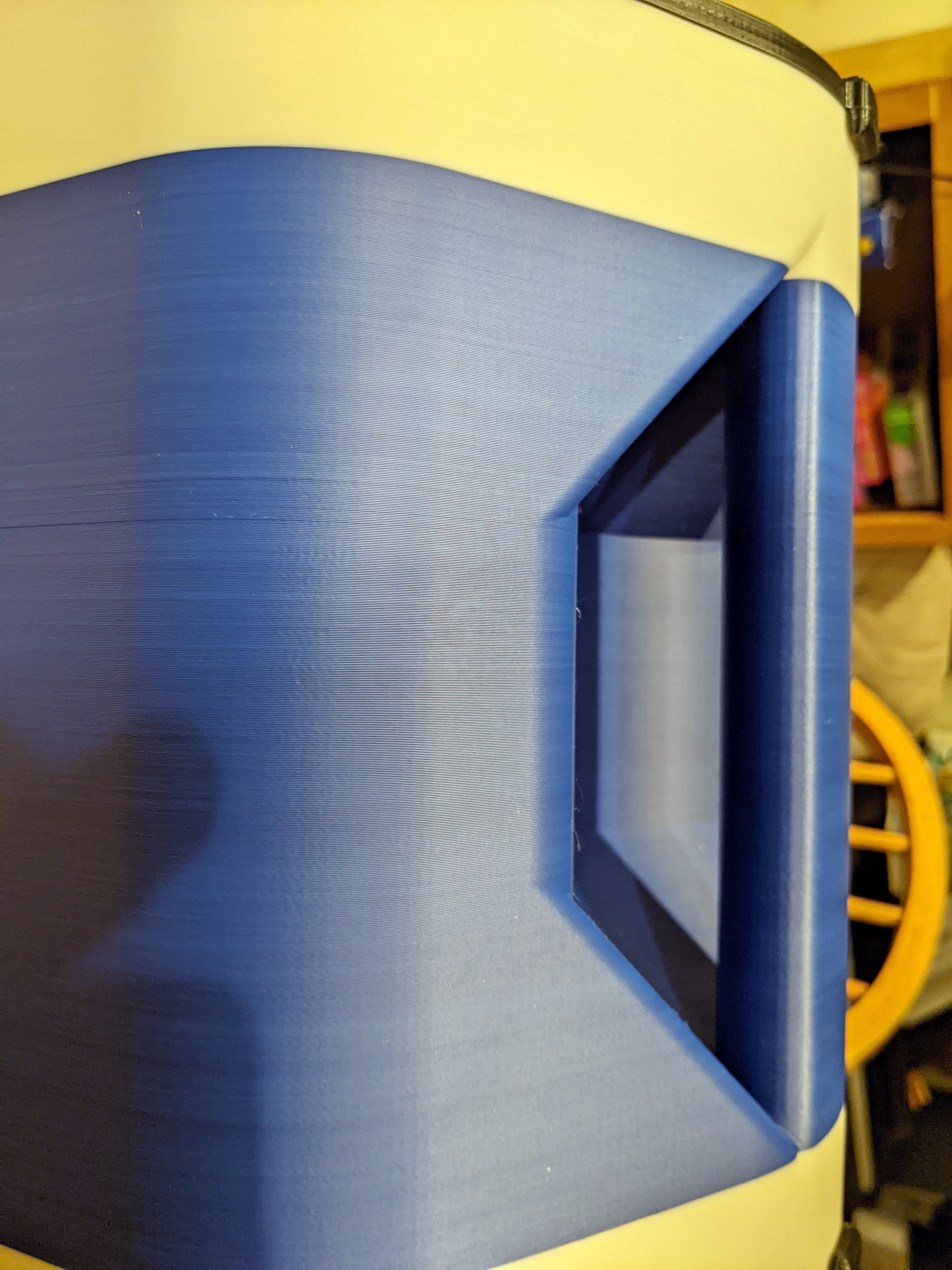
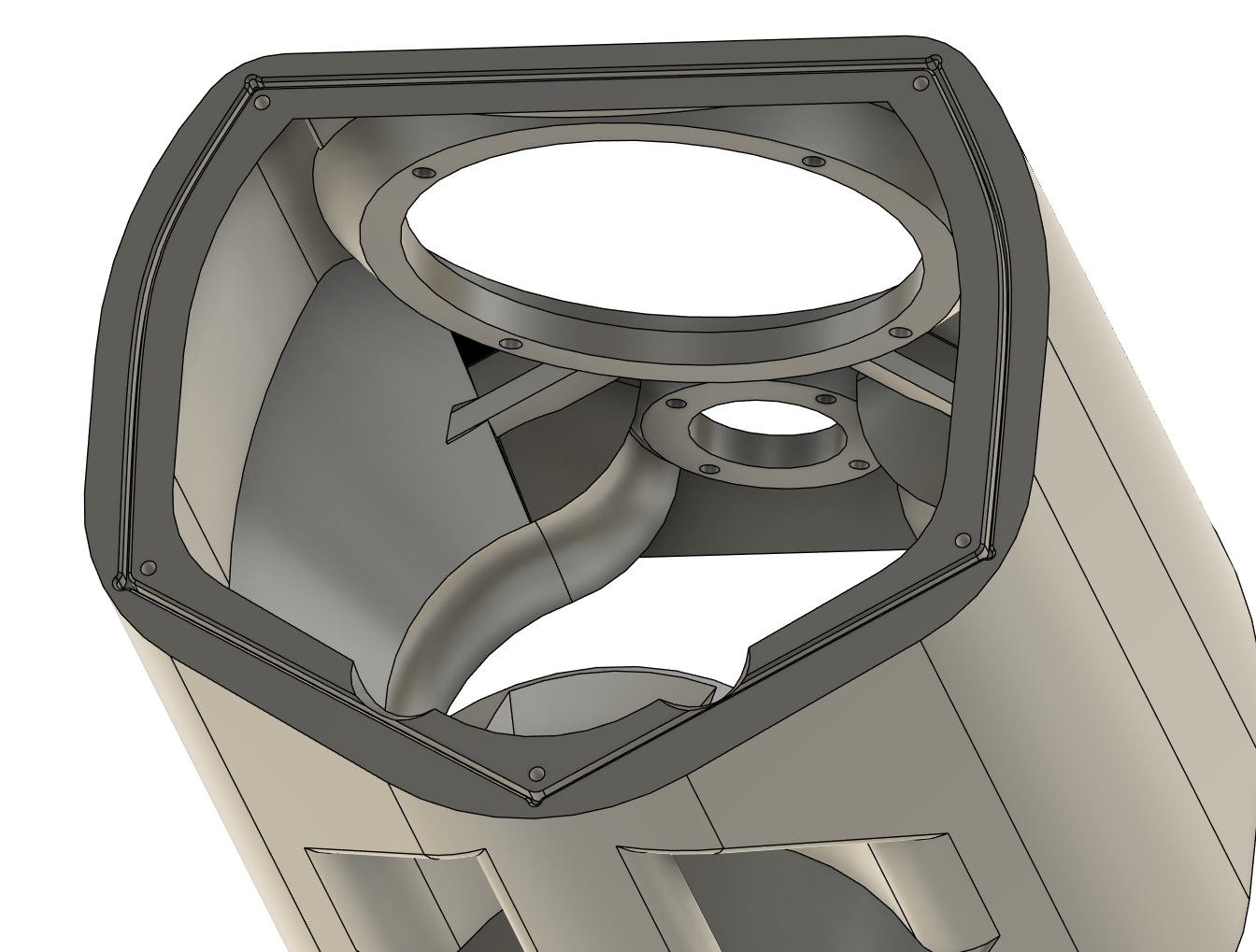
The print itself is three pieces: the bottom bit (black), the middle bit (white, blue, and white again thanks to not having enough white left to do it all in white), and the black top. Here’s a CAD view that more clearly shows the three pieces:

the three pieces are held together with heat-sets and m3 bolts. There’s also a tong and groove like joint to help the enclosure leak less air. I haven’t noticed any evidence of air leaks while listening.
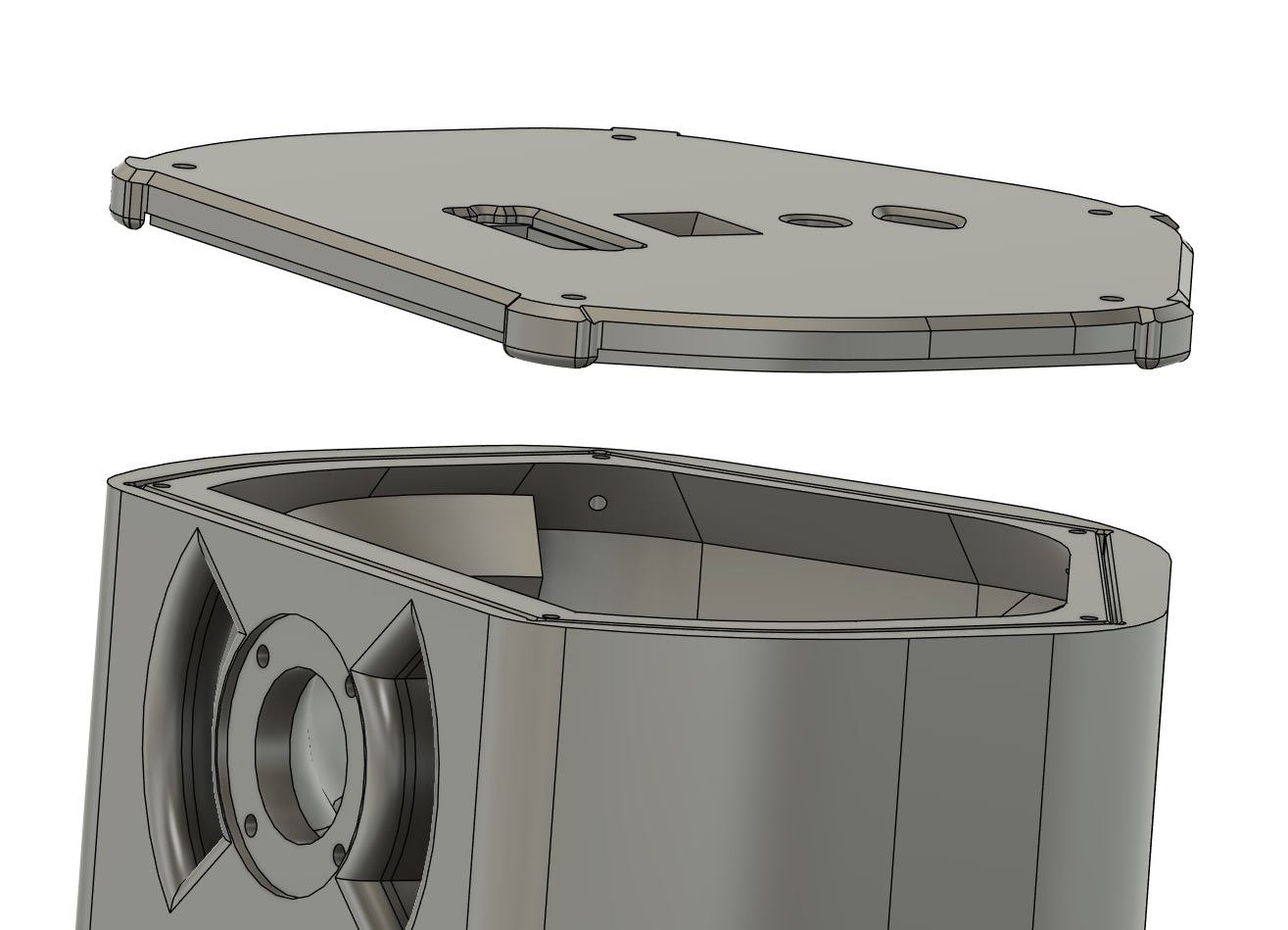
The amplifier and battery board mount to the bottom like so:
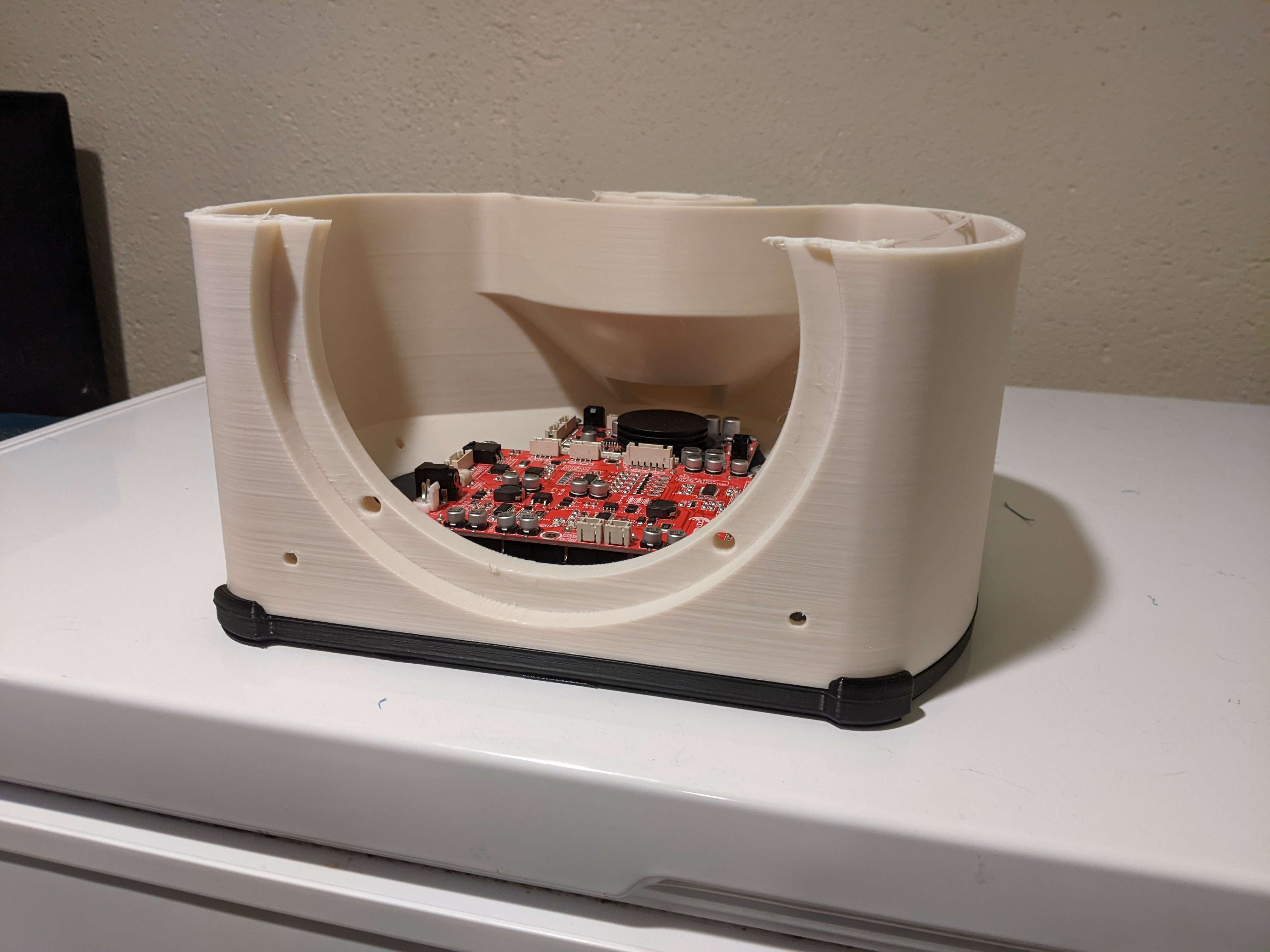
The middle was printed with some supports for the driver overhangs, but the ports and everything else were designed to print in place without supports.
This is certainly not meant to be audiophile build, but it’s surprisingly decent. This isn’t my first blue-tooth speaker, or even my first printed loudspeaker enclosure, but it is the first that was somewhat intentionally designed to have OK bass response while also being reasonably compact.
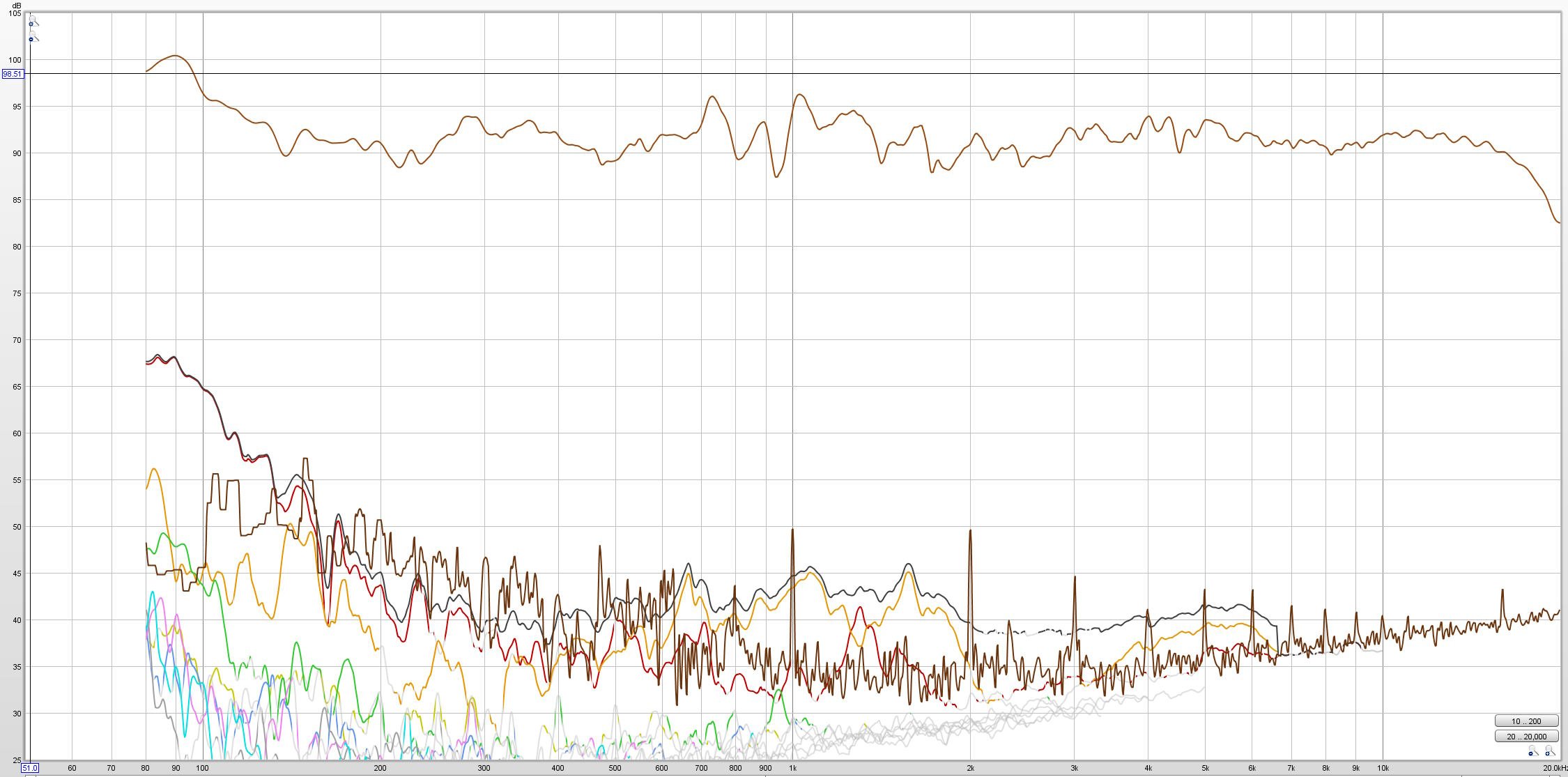
It measures fairly well. Frequency response, along with harmonic distortion, is pretty good. There’s zero windowing or smoothing on this plot. I suspect the distortion spikes at 1 kHz, 2 kHz, etc are induced by the Bluetooth stack the board is running since they’ve shown up in multiple different enclosures and with multiple different drivers.
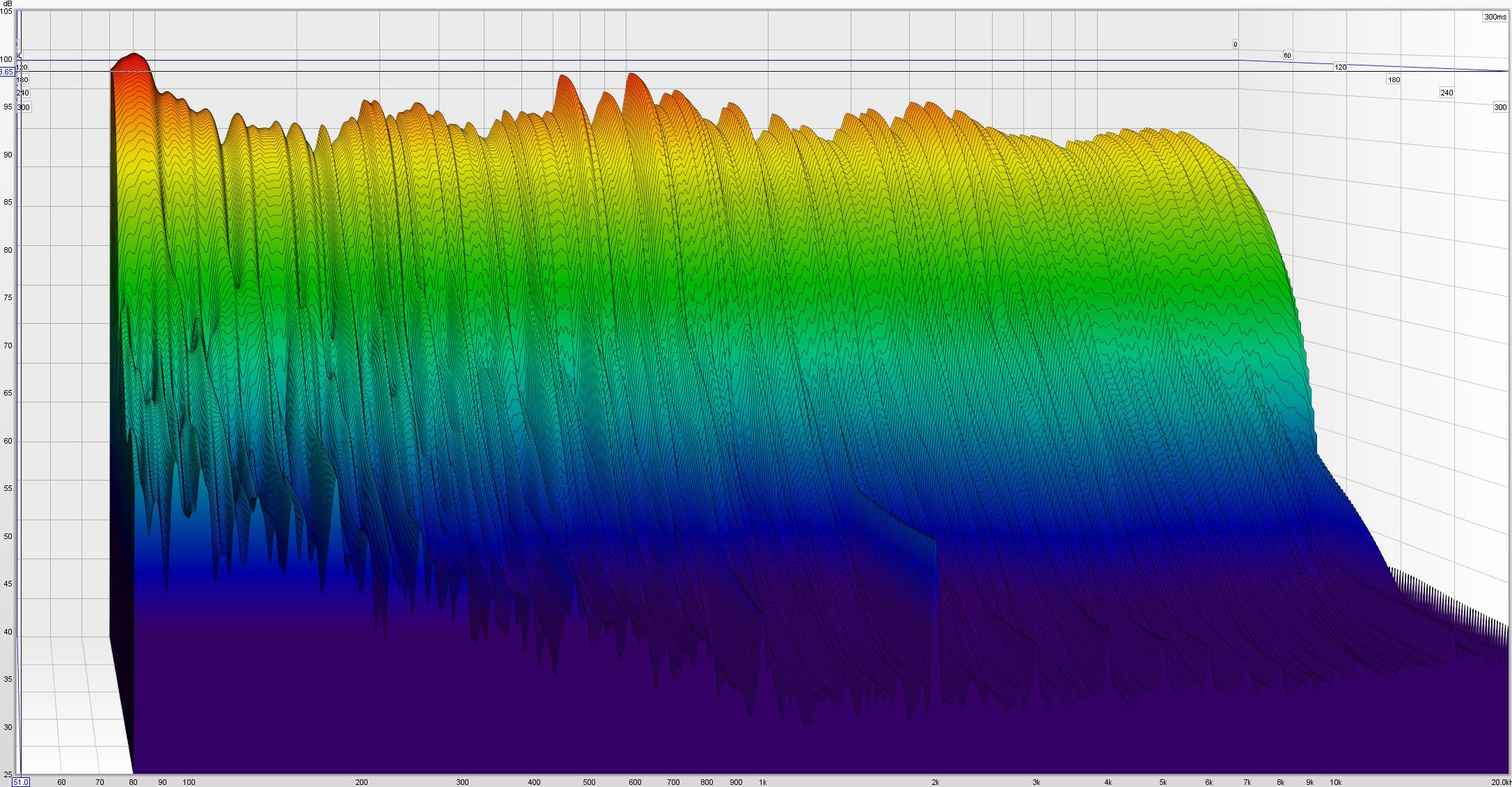
There’s no nasty ringing, caused by either the drivers or the enclosure, so life is pretty good:
Thanks! There are two “big” details that I did think about to some extent.
The first big choice was what kind of enclosure type I wanted. This winds up running into Hoffman’s Iron Law, which means choosing two: low end bass, efficiency, and size. I chose size and low end bass, which means that I went with a traditional ported enclosure. I did consider, and spent some time modeling, a more exotic double bass reflex enclosure, but it just wound up being too large. Modeling in this sense involves acoustic modeling, which I did in WinISD for the ported enclosure and Hornresp for the double bass reflex, and physical modeling, which I did in Fusion360. I also selected drivers that would play fairly well with one another.
The second was geared more toward printing. Curved surfaces resist flexing more than flat surfaces, so most everything is curved or has a reinforced (eg the top and bottom). I wanted to minimize the need for supports, so the ports have “built in” supports. There’s also the tongue and groove thing for the top and bottom to minimize air leakage.
As far as the drivers without the enclosure, an enclosure adds two things:
I just splooshed. Never have I seen a sexier lemmy comment than that.
Ha, thanks!